New rotary steerable system designed to optimize wellbore quality

John Clegg, Weatherford
It can take as little as two weeks to drill a horizontal well, but it may be expected to produce for years or even decades. Therefore, any problems that are introduced and any imperfections that are inadvertently left behind when drilling the well can have adverse impacts on production that linger for orders of magnitude longer than the time to drill. And these impacts on production are in addition to the problems that can accrue in drilling and completions if the well is drilled sub-optimally.
The following will look at some of the ways in which the quality of drilling can impact on the whole life value of the well, and how technology can help to optimize it.
The industry has been drilling directional wells for a century now. Some of the first directional wells were used for onshore-to-offshore drilling at Huntingdon Beach, California, in the 1930s. Since then the ability to drill basic directional wells, then horizontal wells, and now the complex wells seen today, has evolved rapidly. Alongside it, the ability to drill wells more and more quickly, at higher and higher rates of penetration, has also grown. Drilling the well is merely the means to the end. As result, how far and how fast we can drill are not the only key performance indicators (KPIs) for success. Ultimately, initial production and ultimate recovery need to be maximized. How can we do this, and are there other KPIs we can look at along the way, to help and guide us?
Tortuosity is a measure of high frequency deviation from plan. In 2018, Ashok and others from the University of Texas at Austin published work1 on what they called Tortuosity Index (TI). It was influenced by work published 10 years earlier on the tortuosity of veins in the human eyeball. This TI is intended to serve as a measure of the total tortuosity in a well, which can be compared with the intended curvature – the well plan – to determine a quality measure for how the well was drilled. A student internship at the same university, also reported in 2018, studied 6,000 real wells and clearly showed the negative impact of high TI on economics. Wells with a higher TI saw an increase in average drilling cycle time per section, an increase in the average rod pump failures per well and, significantly, a decrease in initial production.
In what has become a seminal paper from 20122, Stockhausen and others showed what can happen when a directional well is drilled with a steerable motor. Alternating slide-rotate-slide intervals can lead not only to significant tortuosity in the well, with regions of higher than anticipated dogleg in the slide sections, but also, incidentally, to significant TVD errors as the minimum curvature calculations we often use assume constant curvature between stationary survey points, which Stockhausen points out is often not the case.
Ashok and his colleagues are not the only ones to have documented the possible detrimental effects of tortuosity. In 2019, a paper by Apache3 showed a beneficial impact on rate of penetration (ROP) resulting from lower TI, after sorting TI into bins. This demonstrates that there is not necessarily a trade-off between drilling the well quickly and drilling it smoothly.
Once the well is drilled, poor tortuosity causes problems. Monterrosa and others4 published the results of modeling the impact of tortuosity on casing standoff. They clearly showed that poor tortuosity can lead to variations in casing standoff all the way down to zero, leading to zero cement thickness.
Poor tortuosity can cause problems with production equipment. For example, a paper from Ledroz et al in 20175 describes the case of an unfortunate electric submersible pump (ESP) that was landed in a highly tortuous section of a wellbore that was thought, from stationary surveys, to be smooth and straight. The ESP in question only worked for a week, before suffering a shaft failure “most probably related to excessive bending while operating…” This confirms what Stockhausen taught in that static surveys can give a false sense of security about the smoothness of a wellbore.
It is also possible that higher TI values can reduce overall production from a well. A study published by Shell in 20196 showed that in at least one formation, a correlation was observed between lower TI and higher production values, but without enough evidence to say that there is causation. Nonetheless, there are intuitive reasons why this might be the case. For example, sumps filling with sand or water and holding back production, or reduction of effective diameter. There are some published models that show how this might happen.
There are many reasons why drilling wells with lower TI values and with higher wellbore quality can be advantageous: reducing drilling cost; reducing cost of completions and production; reducing maintenance of production equipment; improving cementing; and even increasing overall production from the well. The question then emerges – how can we drill less tortuous wells?
The author argues that a key requirement for drilling a less tortuous well is to use a directional system that is capable of not providing a bias to the bit – that’s right, not providing a bias. A steerable motor is effectively a mud motor with a bent housing close to the bit, which is used to provide some bias to the drill bit. If the toolface of the bend is oriented correctly, when the motor is used in sliding mode the bit will drill approximately in the direction it is pointed, and a curve will be drilled. If the motor housing is rotated from the surface, the bias is effectively canceled, and the assembly will drill approximately straight. Unfortunately, wellbore quality is compromised because, among other things, the steerable motor drills an oversized hole when rotating (drilling straight) and a gauge hole when sliding (drilling the curve), and the transitions between the two modes add “speed bumps” which are illustrated in the Stockhausen paper2. As mentioned above, the same paper also illustrates how the slide-rotate-slide cycle introduces short sections of higher than expected dogleg into the well. So, arguably, the steerable motor was designed to optimize dogleg performance and not wellbore quality.
Similarly, many rotary steerable system (RSS) tools were designed to optimize dogleg, and did not take account of tortuosity and wellbore quality. In contrast, Weatherford’s Magnus RSS7 was designed from the outset with wellbore quality in mind.
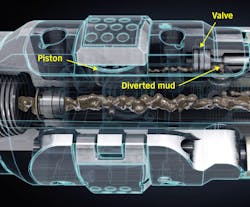
The Magnus tool has three steering pads, close to the bit, which are used when needed to apply a side force and deflection to the bit in order to push the bit sideways and thereby change the direction of the well. If maximum dogleg is required, each of these pads is extended once per revolution, resulting in a continuous lateral bias to the bit and thereby the desired build, turn, or drop. However, there are many instances where maximum dogleg is undesirable, and a lower dogleg is needed, or even when no bias is required at all. For example, when drilling out the casing shoe or reaming to bottom.
The tool meets this requirement by making each of its three steering pads independently addressable and controllable. Each pad is actuated by drilling mud, using the pressure drop between bore and annulus to act on a piston which extends the pad. A rotary control valve is used to determine when the pad is pressurized. If maximum bias is desired, each valve is opened once per revolution of the drill bit. If no bias is desired, all three valves can be parked in a closed position, effectively making the steering pads into an undergauge near bit stabilizer with no impact on steering. And if a partial bias is needed, anywhere from 0% to 100% of maximum, valves share time between being open and closed on a cycle of a few seconds in order to achieve the desired bias percentage. Doing this on a short time cycle means that the curve, or tangent, drilled is as smoothly as possible and that any unwanted tortuosity, or hole enlargement, is eliminated.
In addition, the ability to drill straight, or to any dogleg up to maximum, enables the true “autopilot” mode. For example, the RSS can hold inclination by using near bit sensors and when necessary adjusting bias percentage, on the same short cycle described above, to overcome any natural tendencies of the BHA or formation. This enables the drilling of very straight and accurate tangent sections.
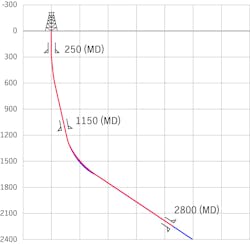
Since being introduced in 2018, Magnus has drilled more than 500,000 ft (152,400 m) in both onshore and offshore applications in North and South America, Europe, and the Middle East. In many cases, performance has been judged not only on the ability to get to target depth (TD) and on ROP, but also often on whether casing or liners can be run in hole after the section has been drilled, and sometimes on the ease of tripping out of hole. A recent example is an offshore run in the Gulf of Mexico with the Magnus 1100 tool in a 17½-in. hole. Kicking off below the shoe, the tool demonstrated its directional capabilities by provision more than 3.5°/100 ft dogleg to achieve the directional plan, and then drilled the whole of the 54.4° tangent in 100% auto-pilot mode while holding the desired tangent angle and with minimal tortuosity. Thus, the RSS enabled the achievement of the three customer drilling goals: drilling the section to TD; improving ROP by 10% when compared to offset wells; and successfully running 13⅜-in. casing to bottom.
This case history is one of many and shows that it is possible to improve drilling performance at the same time as, and possibly even because of, a reduction in tortuosity and an increase in wellbore quality.
Further evidence for improved wellbore quality comes from an ultrasonic caliper taken at the same time as the Magnus tool was first tested, onshore USA. The blue traces show stacked “potato plots” which indicate the location of the center of the hole, and its shape and diameter, as drilling progresses. The very ribbed-looking well on the left was drilled with a steerable motor, while the much smoother looking well on the right was drilled with the Magnus rotary steerable.

To conclude, although high ROP can be achieved with modern drilling systems, we must also look at other indicators of drilling success including wellbore quality. The benefits of improved wellbore quality are manifest, and nowhere is it likely to be more important than when drilling an expensive offshore well. Achieving it is not at odds with achieving high ROP (in fact wellbore quality may enable higher ROP), and tools like Weatherford’s Magnus RSS are available ideally positioned to help operators and drilling contractors to optimize it.
References
1. D’Angelo et al: 2018, Monitoring Wellbore Quality in Real-Time Using a Geometrically Derived Tortuosity Metric, URTeC 2901598
2. Stockhausen, Lowden & Lesso: 2012, Directional Drilling Tests in Concrete Blocks Yield Precise Measurements of Borehole Position and Quality, IADC/SPE-151248-MS
3. Shahri et al: 2019, Case Studies: Optimizing BHA Performance by Leveraging Data and Advanced Modeling, SPE-196020-MS
4. Monterrosa, Tay & Salazar: 2019, Using High-Resolution MWD Survey Data in Mud Removal Simulations for Effective Cementing Program Design, SPE/IADC-194101-MS
5. Ledroz et al: 2017, High Density Survey Data and ESP Placement – Case Studies, SPE-185140-MS
6. Baumgartner et al: 2019, Using Big Data to Study the Impact of Wellbore Tortuosity on Drilling, Completions, and Production Performance, SPE/IADC-194182-MS
7. Clegg et al: 2019, A Paradigm in Rotary Steerable Drilling - Market Demands Drive a New Solution, SPE/IADC-194170-MS